image registration progress
I found most of the code necessary for the image registration process. For steps 1.) features, 2.) Putative correspondences, 3.) RANSAC robust estimation, I was able to use code from Peter Kovesi, which can be found at:
http://www.csse.uwa.edu.au/~pk/Research/MatlabFns/index.html
for the 4.) Optimal estimation step I am using a nonlinear maximum likelihood homography estimation program from code made available by Andrew Zisserman at:
http://www.robots.ox.ac.uk/~vgg/hzbook/code/
With a little bit of tweaking this code fits correctly. I also am using code that I got from Carolina Galleguillos, who got it from Serge Belongie, which lets me directly calculate homographies using user input and test the homographies that I get from the registration process.
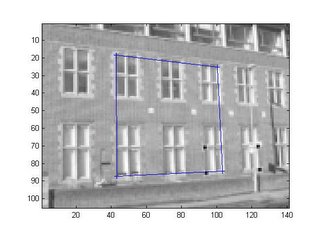
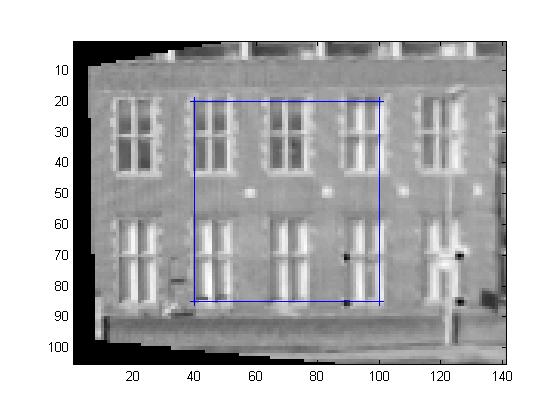
Here are the initial results that I am getting. This is the image that we start with.
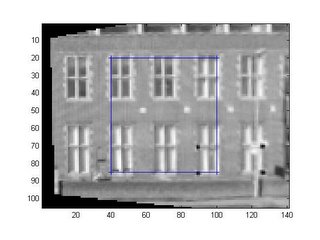
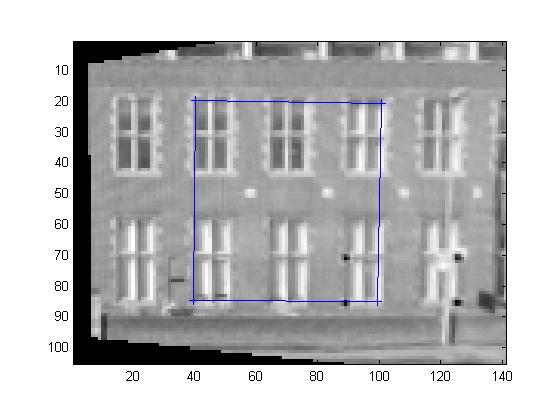
The next image is one that is computed using the code to calculate and apply homographies based on user input.
Using the image registration process to find a homography for the starting images and the second calculated image, then applying that transformation to the starting image this is what we get.
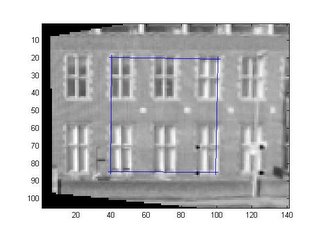
We can see that this is not exact because the lines for the section chosen are not completely square like in the second image. Finally after applying the optimazation step we end up with this image.
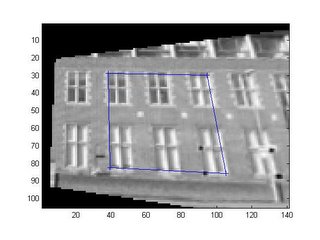
It is apparent from this example that the optimization step is actually making the homography less accurate. I am not sure why this is yet, but hopefully while implementint the last step 5.) Guided matching, and then iterating steps 4.) and 5.) as per the algorithm I will either discover a bug or the process will resolve the issues of inaccuracy.
My next steps are to finish the last portion of the registration algorithm, run it on a couple of more examples, and start the next steps in the super resolution algorithm. These steps will be photometric registration, and if that goes quickly, starting on the mosaicing step.
http://www.csse.uwa.edu.au/~pk/Research/MatlabFns/index.html
for the 4.) Optimal estimation step I am using a nonlinear maximum likelihood homography estimation program from code made available by Andrew Zisserman at:
http://www.robots.ox.ac.uk/~vgg/hzbook/code/
With a little bit of tweaking this code fits correctly. I also am using code that I got from Carolina Galleguillos, who got it from Serge Belongie, which lets me directly calculate homographies using user input and test the homographies that I get from the registration process.
Here are the initial results that I am getting. This is the image that we start with.

The next image is one that is computed using the code to calculate and apply homographies based on user input.
Using the image registration process to find a homography for the starting images and the second calculated image, then applying that transformation to the starting image this is what we get.
We can see that this is not exact because the lines for the section chosen are not completely square like in the second image. Finally after applying the optimazation step we end up with this image.

It is apparent from this example that the optimization step is actually making the homography less accurate. I am not sure why this is yet, but hopefully while implementint the last step 5.) Guided matching, and then iterating steps 4.) and 5.) as per the algorithm I will either discover a bug or the process will resolve the issues of inaccuracy.
My next steps are to finish the last portion of the registration algorithm, run it on a couple of more examples, and start the next steps in the super resolution algorithm. These steps will be photometric registration, and if that goes quickly, starting on the mosaicing step.
posted by jesse at 1:04 PM
![]()

0 Comments:
Post a Comment
<< Home