bayesian super-resolution
Currently i am working on implementing a super-resolution algorithm which is based on bayesian image priors. This can be found in Capel's thesis on super-resolution. This method uses a generative model. The equations and ideas are almost identical to those in my previous post "failed start". Fortunately in capel's work he goes into grusome detail on many of the things which could not be understood in the other paper.
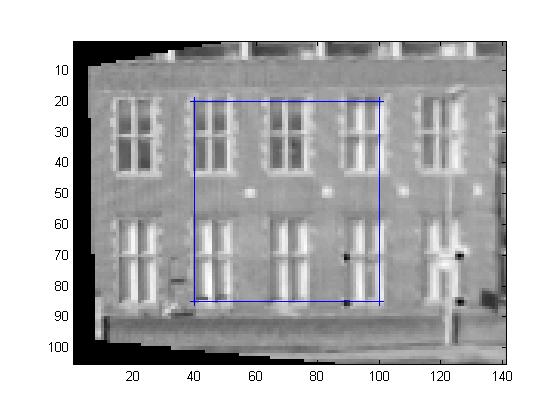
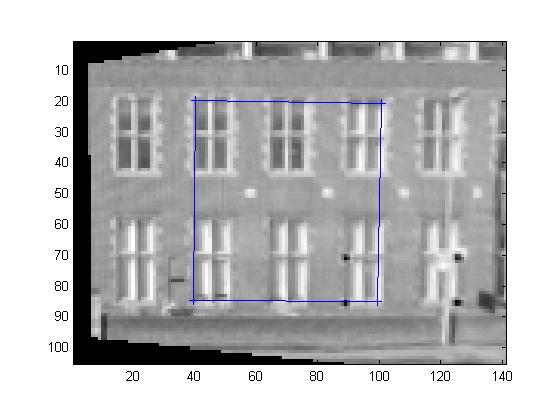
The generative model relies on the parameters that are found by the image registration algorithms, as well as some Bayesian image priors. Using these things and optimization it is then possible to solve for the super-resolution image.
The generative model relies on the parameters that are found by the image registration algorithms, as well as some Bayesian image priors. Using these things and optimization it is then possible to solve for the super-resolution image.
posted by jesse at 2:44 PM
3 comments
![]()