photometric registration
The next step in the super resolution algorithm is photometric registration. Since not all images are necesarily taken under the same lighting conditions it may be necesary to adjust for lighting changes. These lighting changes could be due to
1.)automatic camera adjustments
2.)illumination change.
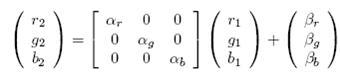
It is assumed that there is a linear transformation between each of the red, green, blue, color channels in the corresponding images. This can then be written as follows:
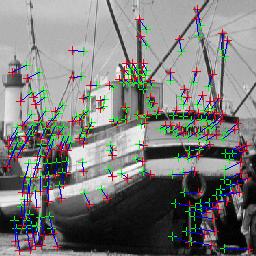
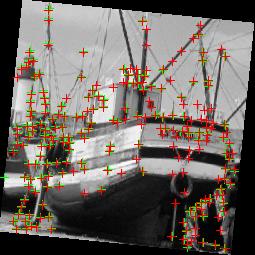
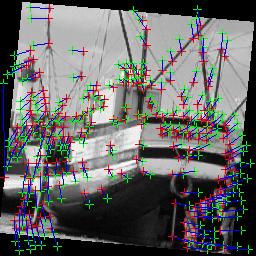
It is then necesary to estimate the 6 photometric parameters. The first step in this process is doing geometric registration, and warping the images so that they are aligned. Since many model-outliers can occur due to shadows, saturation, or specularities, we must use a robust algorithm to do the line fitting. The one that Capel discusses is MSAC(a.k.a. MLESAC) which is a variation of RANSAC. The difference is that RANSAC adjusts the model parameters in order to maximize the number of inliers and MSAC adjusts the model parameters in order to maximize the likelyhood of getting the given data with the proposed model parameters.
I am currently working on understanding an implementation of MLESAC by Torr. Torr has this and several other image processing programs in matlab available at:
Hopefully this code will fit my needs and I will soon have the photometric registration portion of the super resolution algorithm working.
1.)automatic camera adjustments
2.)illumination change.
It is assumed that there is a linear transformation between each of the red, green, blue, color channels in the corresponding images. This can then be written as follows:

It is then necesary to estimate the 6 photometric parameters. The first step in this process is doing geometric registration, and warping the images so that they are aligned. Since many model-outliers can occur due to shadows, saturation, or specularities, we must use a robust algorithm to do the line fitting. The one that Capel discusses is MSAC(a.k.a. MLESAC) which is a variation of RANSAC. The difference is that RANSAC adjusts the model parameters in order to maximize the number of inliers and MSAC adjusts the model parameters in order to maximize the likelyhood of getting the given data with the proposed model parameters.
I am currently working on understanding an implementation of MLESAC by Torr. Torr has this and several other image processing programs in matlab available at:
Hopefully this code will fit my needs and I will soon have the photometric registration portion of the super resolution algorithm working.
posted by jesse at 1:43 PM
2 comments
![]()